Welcome to Typed Linear Algebra. Thank you for choosing this session. How to Not Crash on Mars is the social media friendly subtitle. Hello, my name is François Carouge. Thank you for having me at C++Now.
Before me begin I would like to thank my employer Johnson & Johnson MedTech for supporting my attendance at this conference. We provide an inclusive work environment to service our patients and communities. The opinions expressed are my own and do not reflect the views of my employer. We make remarkable robots and we are hiring.
Do you know which launch this is? And do you know how the mission concluded?
// Built-in types:
double run_duration_seconds{42.};
double building_height_meters{99.};
// Unit types:
std::chrono::seconds run_duration{42.}
mp_units::quantity building_height{99. * m};
You may have seen code that uses the built-in syntax types to represent entities with additional semantic: the duration of a run in seconds or the height of building in meters. The semantic of the variable is not encoded in its type. It is sometimes implicitely attached to the variable in its name. Or it is sometimes described as a comment somewhere. Or sometimes relies on the implicit convention of systematic usage of the a system of units in the code base such that units are rarely identified explicitely. All of our tools struggle to protect human users from invalid operations such as assiging the time value to the building height variable. Only built-in implicit type conversion may be protected with compiler flags. And without external controls, the resulting defects may end up crashing, on Mars.
// Vector with built-in types:
vector v0{1., 2., 3.};
// std::vector<double>
// std::span<double, 3>
// Eigen::Vector<double, 3>
// Vector with unit types:
vector v0{1. * m, 2. * m, 3. * m};
// std::vector<quantity<m>>
// std::span<quantity<m>, 3> ?
// Eigen::Vector<quantity<m>, 3> ??
// Do as the built-in types? double * double = double 🗸
// length * length = area 𐄂
There exists a variety of linear algebra libraries in C++: the C++26 `std::linalg` combined with the C++23 `std::mdspan`, or higher order libraries such as Eigen, Kokkos. We will use these libraries in our examples today. A common data structure type found in linear algebra is that of a column vector, abbreviated a vector. Traditional representations of a linear algebra vector can be made with `std::vector`, C-arrays, `std::span`, or an `Eigen::Vector`. Tradeoffs exist for sizes known at compile-time or at run-time, owned memory or views over a range, and linear algebra operations availability.
// Vector with heterogeneous unit types:
vector v0{1. * m, 2. * m / s, 3. * m / s2};
// vector type?
// Matrix with heterogeneous unit types:
matrix m0{{1. * m, 2. * m / s },
{3. * m / s, 1. * m / s2}};
// matrix type???
More difficulties arise when the linear algebra vectors have heterogenous types. The existing linear algebra libraries are simply not equipped to allow such idiomatic code.How would you design a strongly typed linear algebra library?
This is not new. Before I detail the references that helped me prepare this library. I must appeal to my physicists, mathematicians, or control theory colleagues who rightfully argue units shouldn't be in linear algebra systems. Who here is familiar with the 1878 Bertrand-Buckingham π theorem? Or its practical application in nondimensionalization of physical equations? The theorem proves linear systems can be rewritten in terms of a set of dimensionless parameters. So technically we could always transform the linear systems to use dimensionless parameters. Unfortunately usage in C++ implementation is hardly systematic. Regardless the theorem does not help in exchanging physical algebraic information through software interfaces. Nondimensionalization is a complementary technic.
Objective
// Update the estimate uncertainty P of a Kalman filter:
p = (i - k * h) * p * t(i - k * h) + k * r * t(k);
std::println("{}", p);
// [[8.92 m², 5.95 m²/s, 1.98 m²/s²],
// [5.95 m²/s, 503.98 m²/s², 334.67 m²/s³],
// [1.98 m²/s², 334.67 m²/s³, 444.91 m²/s⁴]]
I author a Kalman filter C++ library. Briefly, the Kalman filter is a control theory tool applicable to signal estimation, sensor fusion, or data assimilation problems. This sample shows an implementation of the estimate uncertainty update of a Kalman filter. It is simple, yet non-trivial. A fair benchmark, objective for today. The estimate uncertainty P shown with its nine values comes from the estimation of the position, velocity, and acceleration of an object in only one-dimension. There exists filters with dozens, hundreds, or more states. Filters with numerous states can get complicated. Development difficulties and safety risk arise in ensuring a parameter is used in the expected position and with the expected units. This was my original motivation.
The general objective for is to guarantee at compile-time the correct usage, access, and algorithms over potentially large and complex linear algebra systems while providing quality of life for the implementors.
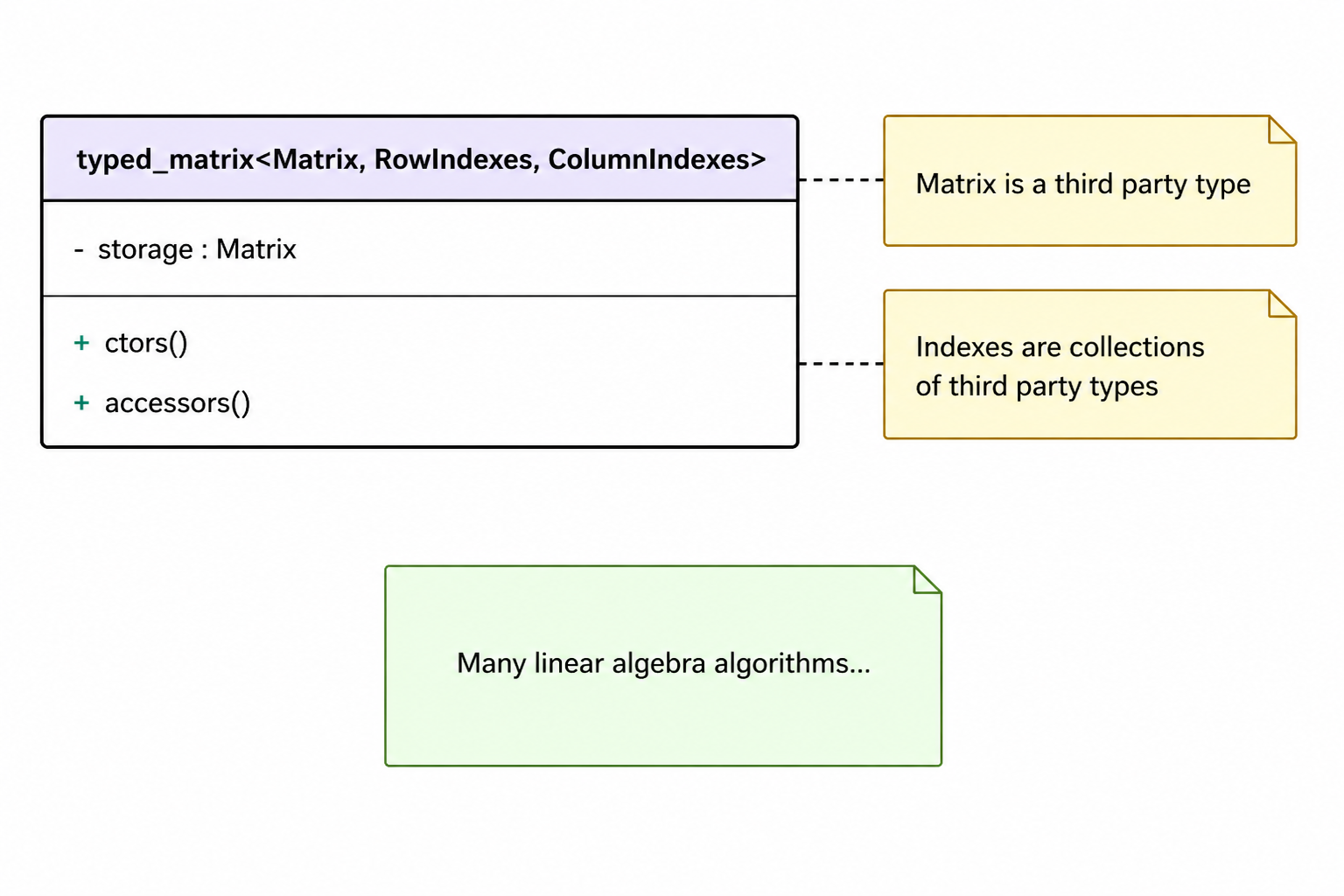
I propose the `typed_matrix` class to compose a third party linear algebra matrix type. This matrix type is injected through a template parameter `Matrix`. This Matrix parameter and its usage may need to transparently accommodate expression templates techniques which permits compile-time reduction of complex linear algebra expressions. I propose not to limit memory model to ownership or view but to support both for now. It is perhaps less common in C++. The strong types of the matrix elements are encoded in collections of types. What do you use for collections of types? Why are there two collections of types? Isn't one collection of N-times-M types sufficient to encode all the individual types of the N-by-M matrix?
template <typename Matrix,
typename RowIndexes,
typename ColumnIndexes>
class typed_matrix {
Some Public Member Types
// [i-th, j-th] element type:
template <int RowIndex,
int ColumnIndex>
using element =
product<std::tuple_element_t<RowIndex,
typename Matrix::row_indexes,
std::tuple_element_t<ColumnIndex,
typename Matrix::column_indexes>>;
We declare the `typed_matrix` class with its three template parameters. These template parameters are also available as member types, not shown here in this class declaration since they are merely aliases.
Some Member Variables
// Sizes are static inline constexpr:
int rows = std::tuple_size_v<row_indexes>;
int columns = std::tuple_size_v<column_indexes>;
private:
// Underlying algebraic backend:
Matrix storage;
The count of rows and columns will be useful as public member variables. And the rank, or dimension of the matrix, not shown here.
These members are static inline constexpr. We will omit all attribtutes (constexpr, nodiscard, and the occasional `std::remove_cvref_t`) in the slideware today for readability. The code is also slightly simplified at times, see the library on GitHub for the details. Please, mentally fill in attributes as we go. We will also not deal with dynamically sized matrices today.
Some Constructors
// Safe default:
typed_matrix()
requires std::default_initializable<Matrix>;
// Vector from values:
typed_matrix(const auto &first_value,
const auto &second_value,
const auto &...values)
requires rank_typed_matrix<typed_matrix, 1>;
// Singleton matrix from convertible value.
typed_matrix(
const std::convertible_to<element<>> auto &value)
requires rank_typed_matrix<typed_matrix, 0>;
The destructor is not shown here. You can imagine a default constexpr destructor.
Neither I will show the copy- and move- assignment operators equivalent to these constructors.
Most matrice libraries made the choice of an unitialized default constructor for historical or performance reason. For a safer linear algebra library, it is appropriate to have a zero-initialized default constructor if the type-erased third party matrix type supports a default initialization. The implementation, not shown here, ensures zero-initialization.
And we can also provide an easy construction for a column or row vector of heterogeneous quantities. Note the parameter pack with two preceding mandatory parameter to disambiguate from other constructors.
The one-element matrix, or singleton, constructor helps the typed matrix to behavior more like built-in types where it can.
// Compatible copy conversion:
typed_matrix(const same_as_typed_matrix auto &other);
// Uniformly typed vector from array:
typed_matrix(const element<> (&elements)[rows * columns])
requires uniform_typed_matrix<typed_matrix>
and rank_typed_matrix<typed_matrix, 1>;
// Uniformly typed matrix from init-list of init-lists:
template <typename Type>
typed_matrix(
std::initializer_list<std::initializer_list<Type>> row_list)
requires uniform_typed_matrix<typed_matrix>;
The compatible copy conversion provide support for safely convertible but not strictly identical typed matrix. One example is that of a matrix where the rows and indexes types are merely transposed. Another example is that of the element types represent the same physical quantity type but the C++ template types are not quite identical but equivalent. Similarly for compatible move conversion, not shown.
The constructor from a C-array is valid for uniform vectors only.
Similarly for init-list of init-list for a type giving a uniformly typed matrix.
Some Accessors
// Compile-time bound-checked typed element read/write:
template <auto... Indexes>
decltype(auto) at(this auto &&self)
requires(sizeof...(Indexes) == rank);
// ! Subscript operator access:
template <typename... Indexes>
decltype(auto) operator[](this auto &&self, Indexes... indexes)
requires(sizeof...(Indexes) == rank)
and((index<Indexes> && ...)
or uniform_typed_matrix<typed_matrix>);
}; // typed_matrix
It seems the best we can do for type-safe compile-time bound-checked access is the standard `at` member, providing the i-th, j-th position as non-type template parameters.
Next is the subscript operator, another sharp edge, here we see it with deducing this to deduplicate operators. The example shown here is that of the square bracket index operator. There is also the identical historical parentheses index operator not shown here. One difficulty with this operator is the lack of possibilities to provide compile-time bound checking. Another difficulty is that in C++ the return type is fixed at compile-time. We cannot vary the return type based on the element accessed at runtime. Therefore we limit this syntax to uniform matrices to preserve our type safety unless a compile-time index was provided. This is a problem. It may be judicious to not support this accessor at all.
FRAGMENT
Some of Many Algorithms
auto operator+ (const same_as_typed_matrix auto &lhs,
const same_as_typed_matrix auto &rhs);
auto operator* (const same_as_typed_matrix auto &lhs,
const same_as_typed_matrix auto &rhs);
void matrix_product (const same_as_typed_matrix auto &lhs,
const same_as_typed_matrix auto &rhs,
same_as_typed_matrix auto &result);
auto transposed (const same_as_typed_matrix auto &value);
void scale (const auto &α,
same_as_typed_matrix auto &x);
Adding algorithms, or operations against the typed matrix is merely done by adding free functions. We've made the choice to avoid the friendship coupling to enable extensibility at this time.
The addition operator shown is one overload among four variations: adding two matrices, and adding a value to a 1-by-1 matrix, left and right handside. There are conditions on the types added, such as the size of the matrix and the convertibility of the types.
The matrix-matrix-product operator shown here is the general case product among six other overloads.
The divison operator, not shown here configurable via yet another customization point object to select the end-user's prefered solver implementation for a matrix decomposition. Matrix division divides the community. Should it exist? Can it exist? In which cases? Remember linear algebra is not commutative, a matrix may not have an inverse, and there may exists multiple solutions.
Should the transposed operation shown here be done in place? Or return memory?
The scale operation, alpha x, done in place here, imposes a dimension-less restriction on the scalar, because the element types of the matrix are fixed.
All in all the library wants to provide drop-in support for all matrix algorithms were possible.
Linear Algebra Layers
Layer
Abstraction
Implementation
High-Level Math
Domain specific
Application
Low-level Math
Linear systems, least-squares, eigenvalue
LAPACK, Eigen, Armadillo, MatX
Performance Primitives
Vector, matrices, operations & solvers
std::linalg, BLAS
Fundamentals
Multidimensional arrays, iteration
std::execution, std::mdspan, std::simd
At CppCon 2023 Mark Hoemmen introduced us to `std::linalg` coming to the standard. His talk included an abstraction layer nomenclature that I paraphrased here. On top of the hardware we find the fundamental support, used by performance primitives where specialized performance hardware implementation are reasonable. Themselves used by the low-level linear algebra mathematics which can be applied to domain specific problems such as statistical inference, physical simulation, control theory.
Where would you place the typed linear algebra support in this table? Perhaps somewhere between application specific high-level mathematics and/or around low-level mathematics? Experimentation seems to support either.
Explored Implementation
Layer
Implementation
High-Level
Kalman
Low-Level
Eigen
Primitives
BLAS
Element Type:
A variety of implementation compositions were explored. At the high-level math applications the Kalman algorithm was my principal motivation.
For low level math, both Eigen and LAPACK have shown to be usable.
And the underlying performance primitives, operations, and solvers can be chosen at linking or loading time. The native Eigen kernels, the BLAS implementation, or Nvidia BLAS implementation, and C++26 std::linalg have all shown to be usable.
As far as element type goes, we've talked about mp-units, and std::chrono.
Interestingly we are talking about a linear algebra library that composes a linear algebra library. There is a quirky property that emerges from the compositions. Not only the typed matrix can use built-in types, making it a classical matrix for drop-in replacement; but also the composed matrix type can be a nested typed matrix itself! I suspect this property will be useful to layer on different types of safety.
Support
template <typename To, mp_units::Quantity From>
struct element_caster<To, From> {
To operator()(From value) {
static_assert(std::same_as<To, typename From::rep>);
return value.numerical_value_in(value.unit);
}
};
template <typename... Types>
using column_vector = typed_column_vector<
Eigen::Vector<double, sizeof...(Types)>,
Types...>;
using position = quantity<mp_units::isq::length[m]>;
using state = column_vector<position, velocity>;
using stateᵀ = row_vector<position, velocity>;
So far we have seen some of the principles of the library. Before we take a look at the implementation, we can see a few usage examples. We start with a little bit of boilerplate.
This first example fragment shows the customization of the element cast. It teachs the library how to cast an element from its underlying type to its strong type. I don't show here all conversion variations from element to underlying.
Example
state x0{3. * m, 2.5 * m / s};
std::println("{}", x0); // [[3 m], [2.5 m/s]]
std::println("{}", x0.at<1>()); // 2.5 m/s
stateᵀ x0ᵀ{transposed(x0)};
std::println("{}", x0ᵀ * x0); // ?
// ^~
// error: static assertion failed:
// Matrix product requires compatible types.
std::println("{}", x0 * x0ᵀ);
// [[9 m², 7.5 m²/s], [7.5 m²/s, 6.25 m²/s²]]
And now the actual usage. The state column vector x0 is a heterogenously typed vector of position and velocity. The library's std::formatter specialization makes the column vector printable.
The at member permits to access the element value. The state transpose is a row-vector.
What do you think is the result of this row-vector--column-vector product? What is the value of the sum of the product elements? What is the result type?
// Non-owning typed vector:
template <typename... Types>
using column_vector =
typed_column_vector<
std::mdspan<
double,
std::extents<std::size_t, sizeof...(Types), 1>>,
Types...>;
std::vector v0(2, 0.);
std::mdspan s0{v0.data(), std::extents<std::size_t, 2, 1>{}};
state x0{s0};
// ...
matrix_product(x0, x0ᵀ, p);
std::println("{}", p);
// [[9 m², 7.5 m²/s], [7.5 m²/s, 6.25 m²/s²]]
Interestingly, no memory ownership assumption constrain the typed matrix. Therefore the typed matrix can compose a `std::mdspan`. Here, the typed column vector is defined with `std::mdspan`, the chosen underlying data representation, and an equivalent column `std::extends`.
Matrix-Matrix Product
auto operator*(const same_as_typed_matrix auto &lhs,
const same_as_typed_matrix auto &rhs) {
// Type safety?
using row_indexes = product<lhs_row_indexes,
std::tuple_element_t<0, lhs_column_indexes>>;
using column_indexes = product<rhs_column_indexes,
std::tuple_element_t<0, rhs_row_indexes>>;
return make_typed_matrix<row_indexes, column_indexes>(
lhs.data() * rhs.data());
}
The matrix-matrix product shows a few of the techniques needed to implement the operations.
The operations leverage ADL, overloads, and concepts to transparently select the most appropriate implementation.
Overloads for matrix-vector products, matrix-scalar products, singleton products are provided, not shown here.
This is the general matrix-matrix product. Operations typically follow this idiomatic implementation: first verify linear algebra and type safety requirements, contracts, assertions; second express the return row and column index types; third and last perform the operation through the backend while using a factory function to decay and forward the resulting types while retaining the possible expression templates of the backend.
For the matrix-matrix product, it appears that the resulting type is the matrix where the row index types are constituted by the product of the left-hand-side matrix row index types with the 0-th column type, and equivalently for the resulting column index types.
What do think you are some of the requirements, assertions, or contracts needed to ensure the matrix-matrix product is a correct and safe operation?
static_assert(lhs::columns == rhs::rows,
"Matrix-matrix product requires compatible sizes.");
A first, simple requirement is that the shapes of the matrices are compatible.
The left-hand-side matrix needs as many columns as the number of rows of the right-hand-side matrix.
NAIVE
for_constexpr<0, lhs::rows, 1>([&](auto i) {
using lhs_row = product<std::tuple_element_t<i, lhs_row_indexes>,
lhs_column_indexes>;
for_constexpr<0, rhs::columns, 1>([&](auto j) {
using rhs_column = product<rhs_row_indexes,
std::tuple_element_t<j, rhs_column_indexes>>;
for_constexpr<0, lhs::columns, 1>([&](auto k) {
static_assert(std::is_convertible_v<
product<std::tuple_element_t<k, lhs_row>,
std::tuple_element_t<k, rhs_column>>,
product<std::tuple_element_t<0, lhs_row>,
std::tuple_element_t<0, rhs_column>>>,
"Matrix-matrix product requires compatible types.");});});});
A second requirement is that each of the element products are compatible, convertible to their sums.
And we can see here a typical naive compile-time assertion over the types of the matrix-matrix product. One issue here is that the compiler error is unreadable when the user attempts an invalid product. Another issue is an apparent equivalent reimplementation of the underlying backend operation for the purpose of type verication. A first lesson: perhaps library writers should compute resulting types from template input types. A length by a length is an area, not a length.
User Defined Literal
template <char... Digits>
constexpr auto operator""_i(); // Returns an integral constant.
// Equivalents for heterogenous matrices:
x0.at<0, 0>()
x0[0_i, 0_i]
x0(0_i, 0_i)
Earlier I showed member access using subscript operator could be made safe when providing a compile-time index constant. One way to convert an integer known at compile-time into a constant is to wrap it into an integral constant. The three access syntaxes now offer the same compile-time guarantees.
Index Safety
state x{3. * m,
2. * m / s,
1. * m / s2};
std::println("{}", x.at<2>()); // Is this velocity?
// Index Safety:
std::println("{}", x.at<velocity>());
// 2 m/s
Strongly typed element is not a suffcient condition for safer linear algebra. Indexes must also be safe. Not only in runtime and compile-time range, but also in type.
In some cases, such as printing here, accessing the wrong index position would be a silent error, when the user intended to print velocity.
Instead we can get the velocity value by type. No error possible. Even better, the position of velocity can change in the state definition, without affecting this code.
But what happens when this state is not one-dimension, but more dimensions? Which velocity is it? And in which frame?
We will need more index safety according to the domains.
at
template <auto... Indexes>
decltype(auto) at(this auto &&self)
requires(sizeof...(Indexes) == rank);
{
// ...
return cast<qualified_element, qualified_underlying>(
self.storage[std::get<0>(std::tuple{Indexes...}),
std::get<1>(std::tuple{Indexes...})]);
}
Let's get back to implementation of the typed matrix methods. The simplified implementation of the `at` member function shown here uses the customization point object `cast`. This element caster objet allows the end-user to teach the library how it can convert underlying type to and from element types. The implementation can be thought of the equivalent of the standard library forward-like utility, with an injected conversion, and index look up and verification. Obtaining the underlying element value is delegated to the composed matrix.
Dragons
state x0{3. * m, 2.5 * m / s};
x0.at<0>() = 2 * m / s; // lvalue reference assignment?
template <mp_units::Quantity To, typename From>
struct element_caster<To &, From &> {
To & operator()(From &value) {
static_assert(std::same_as<typename To::rep, From>);
static_assert(sizeof(To) == sizeof(From));
static_assert(alignof(To) == alignof(From));
To __attribute__((__may_alias__)) *q{
reinterpret_cast<To *>(&value)};
return *q; // 𐄂 Undefined Behavior
}
};
This snippet of code looks quite canonical.
How would you implement the conversion in the `at` member function? Would there be limitations and aliasing violations?
Write Alternatives
Alternative
Drawback
lvalue reference
Undefined behavior.
setter
Loss of ergonomics.
reference wrapper
Loss of ergonomics.
strong storage
Performance loss?
What can we do if we can't provide direct reference access to a safe type? And what do we lose in the trafeoffs?
A setter syntax or a reference wrapper moves the syntax away from current practices. They prevent structured bindings out of the box. Perhaps lifetime extension could be useful?
Can we use a strongly typed storage directly? We may suffer performance loss.
Strongly Typed Storage
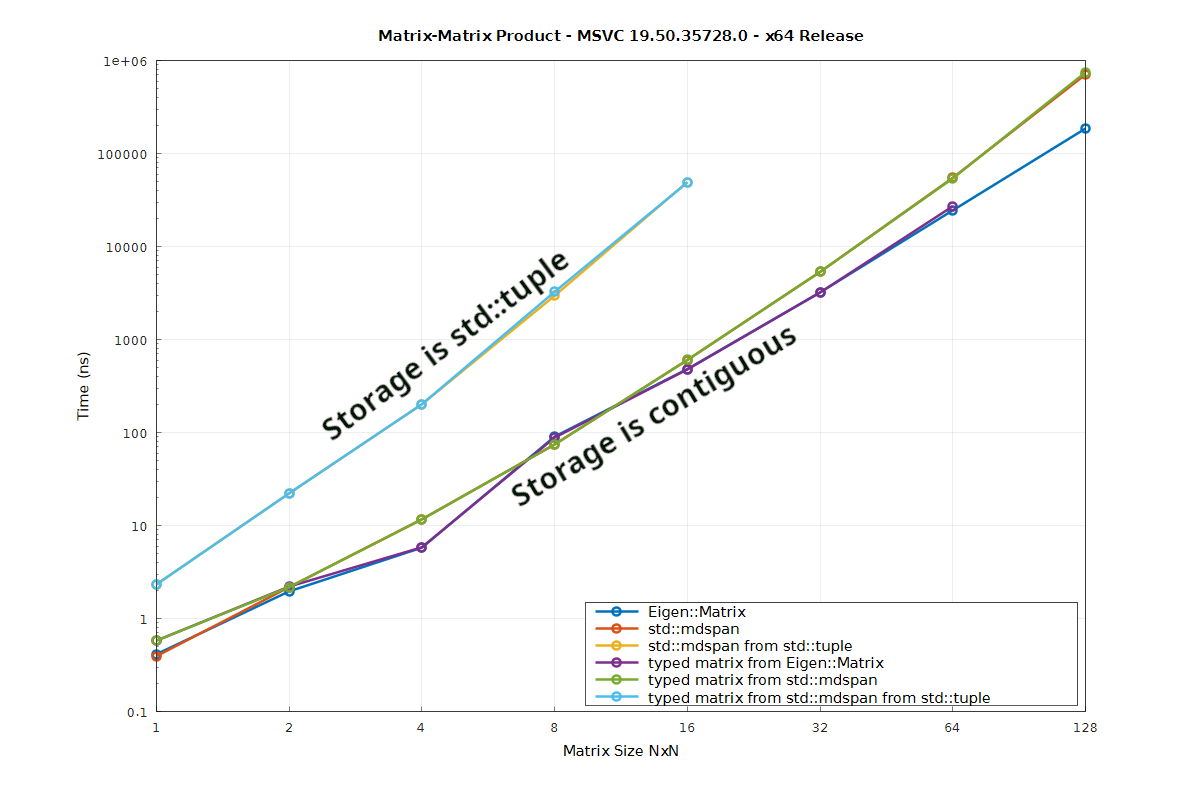
Let's look into the runtime performance of matrix-matrix product for different types of matrices, typed or non-typed, stored as tuples or arrays. The row-column size on the X axis. Time in nanoseconds on the Y axis. Lower time is better.
The matrix-matrix product performance for Eigen and std::mdspan are identical on my machine.
The matrix-matrix product performance for the typed matrix version for Eigen and std::mdspan are identical to their underlying linear algebra backend. Confirming a known result by previous work.Why do you think that is? Differential profiling indicates the cost comes from getting the tuple value in the accessor policy of std::mdspan. It makes sense: the tuple is not an array. The tuple may have different element alignment, padding, order, and non-standard-layout. Using a strongly typed underlying storage may mean reduced runtime perfomance at this time. Meaning we keep using the classical Eigen and std::mdspan for our underlying algebraic needs.
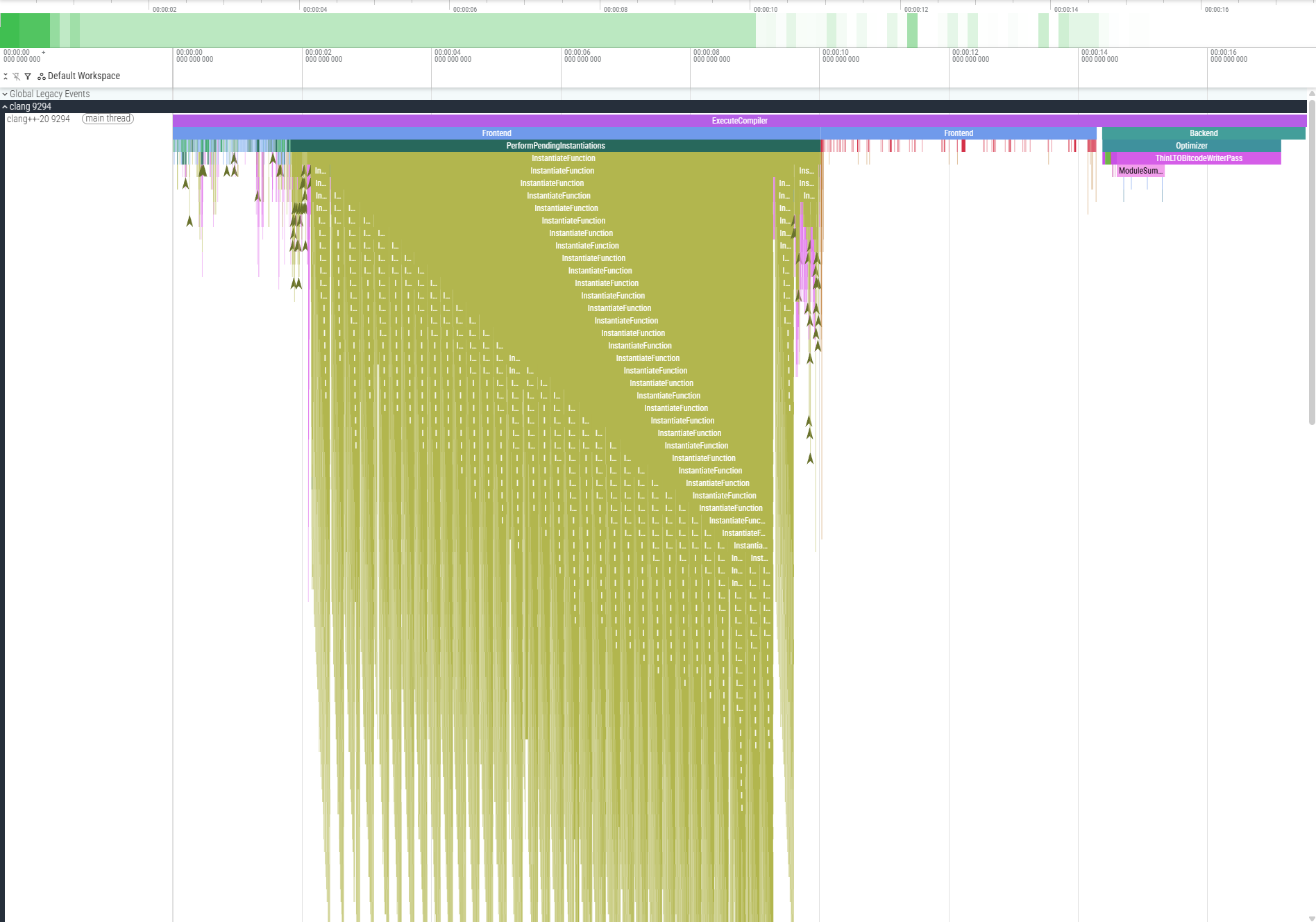
About recursive template instantiation. This figure shows a compile-time trace of a 32x32 matrix-matrix-product with a naive recursive template instantiation for the template type list and operations. This trace is 16 seconds long, to compare with a baseline of 3 seconds for its non-typed matrix equivalent. Beyond the long compile-time, this implementation sufferred from extreme compilation memory usage, deep recursive template instantion. We hit limits in memory consumption. We hit limits in depths of instantiation. We hit limits on my patience waiting for compilation.
There is a number of transformations and techniques we use to avoid this issue. For example, we don't instantiate types for evaluation in expressions, and we use iterative template implementation instead of recursive implementations. These techniques can be insufficient and as the type lists grow large we hit compilers, implementation, and platform limits.
It remains to be seen how much better this can get.
Future Work
Positional access replaced by typed access.
Exhaustive std::linalg / Eigen algorithms.
Sparse matrices, dynamic sizes.
Tensor? N-dimension generatlization?
Memory ownership: Yes? No? Both?
Optimize type-list / std::tuple compile-time scalability.
Optimize compile-time.
Nondimensionalization.
Usage feedback. Let’s play!
What is next for this work?
Index safety comes next along with more kind of safeties and examples: index access and reference frames.
More, or all, algorithms supported for `std::linalg` and `Eigen` to support an effective drop-in.
Exploration of dynamically sized typed matrices, sparse matrices.
A generalization to N-dimension, tensors come to mind.
Perhaps deciding for one or more memory ownership model.
Type-list, `std::tuple` compile-time scalability improvments and other optimizations.
Of course we want to confirm and demonstrate the complementarity of nondimensionalization and typed linear algebra.
Lastly user feedback beyond my limited needs to teach us if this library is actually useful adn practical at scale.
Typed Linear Algebra
github.com/FrancoisCarouge
Thank you for joining this talk about what I believe to be the first extensive open source and permissive implementation of a typed linear algebra library in C++. I hope this talk will help you build safer linear algebra applications. You can find this talk and the library by following this link. At this time I would welcome any question or comment.
Abstract
Typed Linear Algebra
Summary
Composed Backend
Forward Operations
Inject Conversions
Deducing This
Constexpr For
Expression Template
To summarize our journey today.
We composed a matrix into a typed matrix to facade the physical quantity types.
The linear algebra operations are forwarded to their equivalent backend while enforcing the type safety.
End-user inject type conversion in a single customization point.
We leverage deducing this to provide a single implementation for the 2, 4, 8, 16 repetitive function versions.
We used template for expression statement to perform compile-time verification over vectors and matrices.
We kept the library transparent to third party expression template design.
Opportunities
Print Format
Template For
Compiler Compliance
Benchmarking
std::linalg
Index Safety
Frame Safety
Taxonomy Safety
The design presents many improvement opportunities.
A low hanging opportunity is the printing format which is a minimal implementation that follows the standard library default without any of its formatting options.
There may be opportunities to simplify the implementation with the C++26 template for expansion statement.
Another opportunity is the library supports the latest versions of the three major compilers and the tip of the supporting libraries. Compatibility and stability is a fun challenge a number of bug reports and fixes have been generated in these projects.
Benchmarking is required to demonstrate the abstraction remains zero cost to enable adoption.
`std::linalg` in C++ 26 comes with many more operations to support. I wonder if reflection could help in generating the operation wrappers for the typed matrices.
I have reached a similar conclusion to Daniel Withopf presentation in 2022 that is, safe linear algebra with physical quantities require index safety. The at member should not use i, j indexes but strongly typed indexes encoding things like the reference frame, character of the quantity, or additional semantic. I suspect there exists an opportunity to implement index safety by yet another composition over the typed matrix, perhaps an indexed matrix.
Finally, there are Jacobian and Information matrices which may need an additional exponent for their type collections to differentiate their taxonomy in operations.
These are just a few of the next steps.
Mp-units six safety levels:
* Dimension Safety - Prevents mixing incompatible dimensions
* Unit Safety - Prevents unit mismatches and eliminates manual scaling factors
* Representation Safety - Protects against overflows and precision loss
* Quantity Kind Safety - Prevents arithmetic on quantities of different kinds
* Quantity Safety - Enforces correct quantity relationships and equations
* Mathematical Space Safety - Distinguishes points, absolute quantities, and deltas
Daniel Withopf linear algebra desired properties:
Compile-time bounds
Expressive entry names
Heterogenously typed vectors/matrices
Typed checks for all operation
Coordinate frame annotations.
Motivation:
[Ariane flight V88] - Ariane 5 rocket destroyed due to unit conversion error ($370M loss)
[Mars Orbiter] - Lost due to pound-force vs. Newton confusion ($327M loss)
[Columbus] - Got Americas “wrong” due to distance unit misunderstandings
Slide ideas:
The whole mess of returning a quantity reference from rep storage.
The whole mess of returning a reference quantity with its side effects.
Alternatives to storage: e.g. storing quantities.
// ! Underlying matrix conversion:
explicit typed_matrix(const Matrix &other);
The last constructor is a sharp edge. The tradeoffs are not always easy and so we may need to be able to construct a typed matrix from its underlying matrix type. This is helpful for implementing operations without friendship, or supporting expression templates. This is a problem.
Some Concepts
// A typed matrix concept:
template <typename Type> concept same_as_typed_matrix =
std::same_as<Type, typed_matrix<typename Type::matrix,
typename Type::row_indexes,
typename Type::column_indexes>>;
// A uniformly typed matrix concept:
template <typename Type> concept uniform_typed_matrix = // ...
// is a typed matrix, and
// each element are of the same type.
The constructors of the typed matrix used concepts to ensure they are meanigful for a given template instantiation of a typed matrix. We show here a couple interesting concepts among the the 10 or so concepts present and used in the library.
In some cases, we want to enable behavior solely for typed matrices. This concept presented with an interesting challenge in its definition: the template parameters of the typed matrix could not be passed in the concept nor deduced. The neat idiom to permit usage of the concept while passing only the single type to check was to re-use the type's under evaluation for its member types. Note the Type parameter is found on both sides of the same type concept.
Learnings
Strong type propagation
std::tuple scalability
Index safety